The first robot moving through the workflow
Amber makes the 10Things process visible on a real robot: artifacts, tests, simulations, and deployment gates around a product intended for sale.
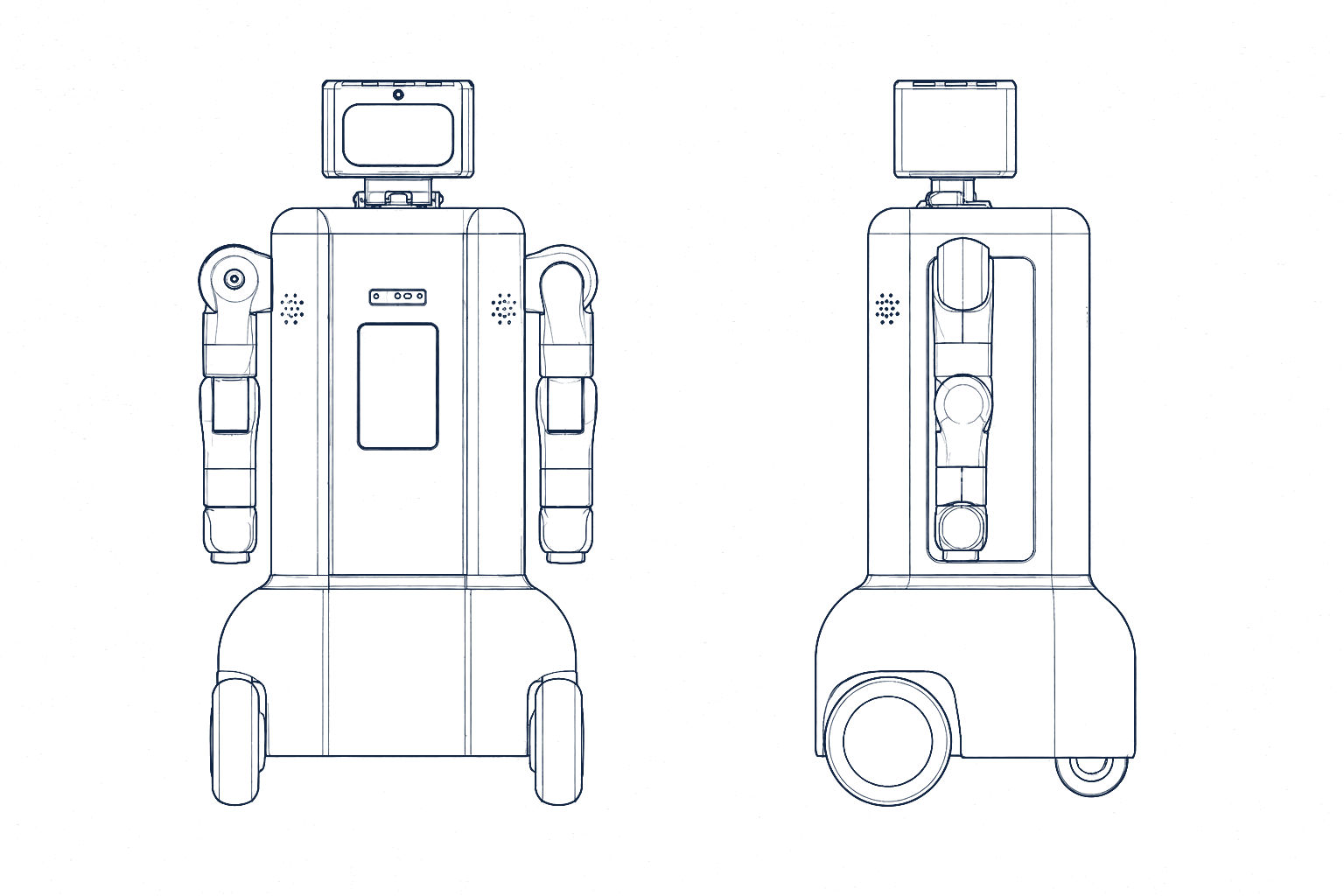
Amber reference architecture
Amber is the robot we use to make the 10Things approach tangible: CAD and hardware understanding, capability definition, simulation-ready assets, robot-ready code, validation, deployment packaging, and eventual sale.
Coming soon
Amber shows how a real robot can move through the 10Things process: understanding the hardware, defining what it can do, validating behavior in simulation, generating control paths, and preparing the work for safer deployment and sale.
We are keeping this page intentionally focused while Amber is still being prepared and documented. Photos, build footage, technical specs, availability details, and milestone evidence will be added as the reference architecture progresses toward market.
What Amber will demonstrate
Why it matters
Amber makes the 10Things process visible on a real robot: artifacts, tests, simulations, and deployment gates around a product intended for sale.
The build will show how simulation and structured capability definitions reduce unknowns before behavior is pushed into real product hardware.
Amber is the reference architecture for turning a robot design into a more controlled, inspectable, and repeatable path toward field readiness and market availability.